Cílem projektu bylo dodání robotizovaného pracoviště na balení potravin do blistrů
Konkrétně se mělo jednat o pracoviště pro aplikaci ukládání slaných tyčinek z listového těsta do plastového blistru a následnou dopravu blistrů k výstupnímu flowpacku.
Standardně se pro manipulaci s takto křehkými výrobky využívá lidská síla. Využití automatizačních či robotizovaných řešení v potravinářském průmyslu sice není nové, ale běžně není dostupné pro každý podnik. Díky promyšlené konstrukci včetně uspořádání technologického celku vzniklo řešení, které cenou může konkurovat. Zároveň v rámci automatizačních a technických možností lze toto řešení uzpůsobit při změně parametrů tyčinek.
- obsluha položí plech s upečenými tyčinkami na vstupní dopravník
- na konci dopravníku shrne přesouvací zařízení 40 ks tyčinek (celý dopravník) směrem k robotům
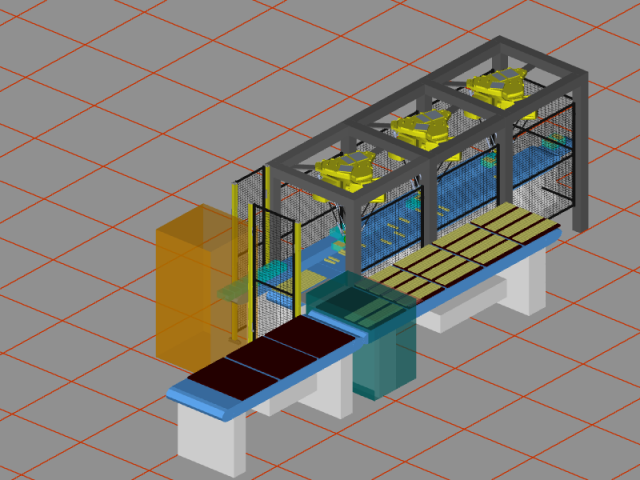
- 3 delta roboty FANUC M-2iA/3S odebírají tyčinky po 2 ks pomocí vakuových přísavek
- tyčinky ukládají do blistrů na počet daný operátorem
- ke každému robotu jsou blistry dopravovány samostatně z centrálního zásobníku
- dojde k usnadnění lidské práce
- vzroste maximální výrobní efektivita
Řešení je koncipované jako pracoviště s využitím 3 ks delta robotů FANUC M-2iA/3SL s nadstavbou HandlingTool. Ty jsou pevně umístěny na kotevních rámech o výšce cca 2 000 mm nad přenašečovým dopravníkem tyčinek. Na dopravník tyčinek je každých cca 8 s přesunuta várka 40 ks tyčinek.
Roboti jsou na zápěstí osazeni chapadly s vakuovými přísavkami pro možnost uchopení 2 ks tyčinek najednou. Chapadla robota jsou ovládána pomocí pneumatických ventilů. Tyčinky jsou ukládány do plastových blistrů, které jsou robotům podávány z automatického dávkovače a následně dopravovány k flowpacku zákazníka. Takt celého pracoviště je 320 ks/min.