Cílem projektu bylo technologické řešení pro třídění naplněných jogurtových kelímků
Dosud bylo třídění jogurtů do zákaznických kartonů dle příchutí řešeno ruční manipulací a ručním tříděním operátorem. To je z hlediska produkce v rámci řádů tisíců kelímků značná zátěž a významná časová i finanční náročnost.
Projekt si kladl za cíl vytvořit zcela nové řešení tohoto problému, kdy je cílem automatizovaně zvládnout manipulaci s křehkými naplněnými kelímky a jejich umístění do přesně vytyčené pozice v kartonovém boxu, aniž by se poškodil jak obal kelímku, tak i samotný box.
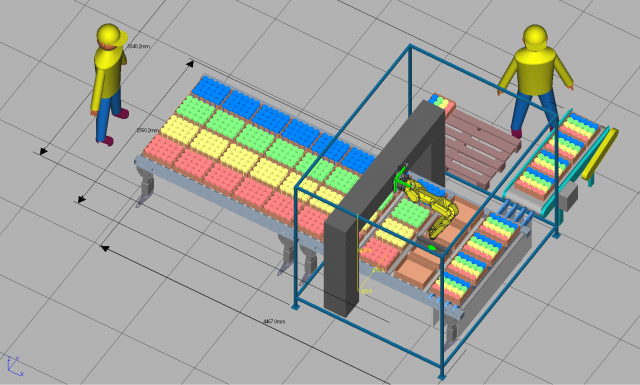
Popis pracoviště
- 4 vstupní dopravníky + 1 výstupní dopravník
- obsluha zakládá kartonové boxy s jednodruhovými jogurty do vstupních dopravníků
- každý ze vstupních dopravníků je určen pro 1 druh/příchuť
- na konci dopravníků přesun řady kartonů na příčný výstupní dopravník
- robot FANUC M-10iA/10M, pověšený na ocelové mostní konstrukci, umístěný v pozici "Wall Mount"
- robot pomocí chapadel odebírá vždy řadu jogurtů z 1 kartonu a překládá je do ostatních kartonů dle zákaznických požadavků